How to Measure Plasma in Fusion Power Plants — Part II: Control Confidently Despite Imperfections
Part II: Control Confidently Despite Imperfections
Introduction
As the global fusion community transitions from experimental devices to commercial fusion power plants (FPPs), diagnostics face one of their most significant challenges yet: measuring a plasma that can no longer be directly observed.
Future burning plasmas will differ dramatically from those in current research tokamaks and stellarators; they will be largely self-heated, operate continuously, and produce intense fluxes of high-energy neutrons and thermal radiation. Under such extreme conditions, most sensors must be placed behind heavy shielding, with limited access to the plasma core. Many traditional diagnostics will simply not survive.
In Part I of this series, we discussed selecting a minimal yet robust diagnostic suite that focuses on essential parameters, neutron resistance, maintainability, and cost. Yet even the best-chosen diagnostics cannot fully reconstruct the plasma state. In this second part, we address the question: How can a power plant maintain safe and efficient plasma control when the available measurements are incomplete, noisy, or delayed? The answer lies not in measuring everything, but in extracting reliable insight from imperfect data. The Plasma Control System (PCS) must evolve from a deterministic controller into an intelligent interpreter of diagnostic signals, capable of reasoning under uncertainty and acting with confidence.
Uncertainty quantification (UQ)
Any physical parameter measurement carries uncertainty from signal noise, calibration drift, and sensor failures or degradation. In magnetic-confinement systems, additional errors arise from model mismatch, as our physical representation of plasma behavior is incomplete. Therefore, quantifying and propagating uncertainty through the PCS is critical for reliable operation [1].
Common UQ techniques include:
- Monte Carlo sampling: brute-force statistical propagation of uncertainty through repeated simulations [2],
- Polynomial chaos expansions: an efficient spectral approximation of uncertainty propagation [3, 4],
- Multifidelity methods: balance speed and accuracy by blending multiple model fidelities [5].
Recent work has extended these methods to real-time control of tokamak plasmas, utilizing an Extended Kalman Filter (a recursive algorithm for uncertainty-aware state estimation in dynamic systems) to track confidence in reconstructed parameters [6].
In an FPP, it is unnecessary to measure every plasma quantity with high precision, as it is crucial to maintain the plasma in a stable operating regime, rather than studying subtle physical processes. The PCS must understand the confidence bounds of key parameters, monitor their dynamics, and respond accordingly. For machine-protection tasks, some quantities (e.g., heat flux or boundary position) must be estimated within milliseconds to trigger rapid safety responses [7].
While UQ establishes statistical confidence, it cannot reconstruct missing or degraded data. That challenge is addressed by machine learning and multimodal data fusion.
Machine learning and cross-diagnostic fusion
When uncertainty limits visibility, machine learning (ML) offers a complementary path — reconstructing, fusing, boosting resolution, bridging different time scales, and interpreting diagnostic data in real-time. ML models can learn the underlying relationships between diagnostics, allowing the PCS to recover missing measurements or infer unobserved plasma behavior.
A promising recent development is Diag2Diag, a multimodal super-resolution framework that learns cross-correlations among diagnostics to infer missing signals [8]. Using data from magnetic, microwave, and optical systems, it can reconstruct high-frequency synthetic kinetic plasma profiles, revealing hidden plasma features, such as the formation of magnetic islands (Fig. 1).

ML methods can assist FPP operations by:
- Cross-diagnostic correlation transfer. Providing pre-trained models to map relationships among diagnostics and fine-tune them for new machines.
- Data processing. Speed up processing of raw measurements to extract desired information in real-time.
- Model-based extrapolation. By utilizing the learned multimodal correlations, early data from sighting discharges can be leveraged to infer unseen parameters (e.g., temperature gradients or ELM precursors).
- Unifying sampling rates. Synchronizing diagnostics of different temporal resolutions into a single time base for unified control loops management.
- Data fusion for reliability. Merging multi-diagnostic data streams to suppress noise and detect inconsistencies, thereby developing a more robust and reliable overall picture of the plasma state.
- Off-normal event prediction. By analyzing historical plasma data to forecast off-normal events, such as disruptions or runaway electrons, this enables proactive intervention by the PCS or protection system. Identifying unforeseen deviations to trigger protection logic before damage occurs.
A recent achievement in this direction is FusionMAE, a large-scale, self-supervised AI model that unifies diagnostic and control data into a single latent representation of plasma states [9]. Trained on HL-3 tokamak data, it reconstructs missing signals with over 96% reliability, acting as a virtual backup diagnostic. Its “plasma state embedding” improves disruption prediction, equilibrium reconstruction, and plasma evolution forecasting, simplifying diagnostic-actuator interfaces. This foundation model could reduce engineering complexity in future FPPs by providing a scalable, adaptive diagnostic layer for real-time control.
Together, these capabilities turn the diagnostic network into a self-correcting information system that maintains continuity even when individual sensors fail.
Synthetic diagnostics
When a particular measurement is unavailable or degraded, synthetic diagnostics (numerical models that mimic the instrument’s output from physics simulations) can fill the gap [10]. These virtual sensors generate estimated signals based on transport or equilibrium codes and can continue supplying data to the control loop, thereby preventing feedback loss.
Synthetic diagnostics are also fundamental to digital twin architectures, where a virtual replica of the plasma and machine runs in parallel with the real system. Operators can test control algorithms, fault scenarios, and actuator strategies offline to ensure optimal performance. However, because their accuracy depends on model fidelity and computational speed, synthetic diagnostics should complement, not replace, physical measurements.
For real-time use, they must be validated during commissioning and benchmarked regularly against actual data to maintain trust and traceability. By achieving this, synthetic diagnostics can be used as a reference for system health monitoring.
Data assimilation
Data assimilation (DA) combines real-time measurements with predictive plasma models to produce the most probable estimate of the plasma state. Borrowed from meteorology and climate science, DA utilizes algorithms such as ensemble Kalman filtering and variational assimilation (4D-Var) to continually update state estimates as new data become available.
Yuya Morishita and colleagues recently achieved a milestone by reporting the first application of DA-based control to fusion plasmas on the superconducting stellarator, the Large Helical Device, demonstrating improved reconstruction accuracy and actuator guidance [11]. For FPPs, DA offers resilience, as it can bridge data gaps, filter noise, and maintain physically consistent estimates even under diagnostic degradation (Fig. 2).
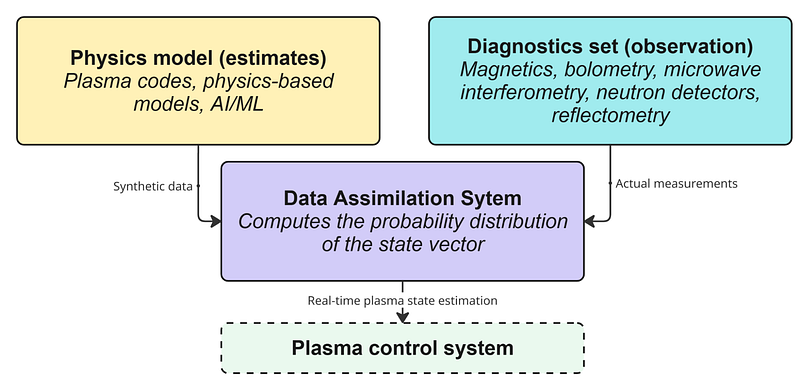
For future FPPs, data assimilation could form the core state observer, combining sparse diagnostics, ML-based surrogates, and model predictions into a unified plasma estimate for a confidence-aware control system.
Model-based and model predictive control techniques
Model-based control (MBC) utilizes a physical or reduced-order model of the plasma system within the control loop to improve state estimation, noise rejection, and feedback accuracy. The model serves as an observer or state estimator generating synthetic measurements to compare with actual sensor data by solving transport or equilibrium equations, or by implementing Kalman filters for dynamic state reconstruction. The discrepancies inform adaptive corrections, ensuring low-noise, drift-free control [12–14].
Control laws are often predefined (e.g., PID, state feedback, adaptive, or robust controllers), but model-derived estimates are used to supplement the measured states. The main goals of MBC are to improve feedback quality when diagnostics are sparse or noisy, create synthetic signals for unmeasured variables, and support fault detection and uncertainty quantification.
Model Predictive Control (MPC), on the other hand, uses a predictive dynamic model of the plasma to optimize future actuator commands over a finite time horizon, considering constraints. At each control cycle, the controller predicts future plasma states over a short horizon using a model (linearized or ML surrogates). It optimizes an objective function (minimizing deviation from the target or reducing actuator effort) while satisfying physical constraints (e.g., coil currents and density limits). Only the initial control action is implemented, and then the horizon shifts forward (receding-horizon control). MPC naturally manages multi-variable coupling, actuator saturation, and rate limits. This principle is illustrated in Fig. 3.
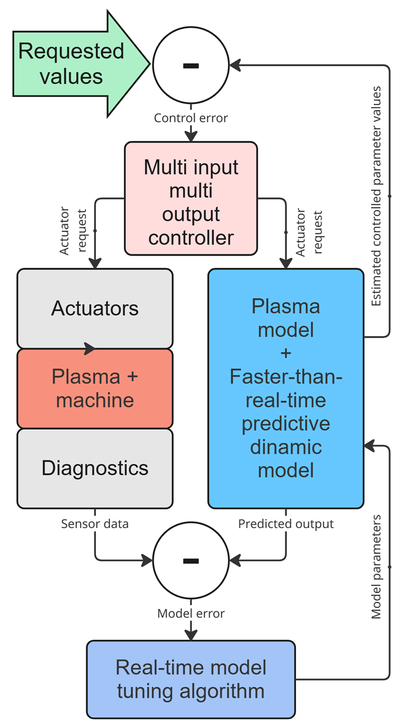
Combining DA with MPC results in a state-estimation-based MPC, where assimilated states inform predictive optimization under uncertainty [15]. This hybrid control approach can sustain confinement and burn conditions even when diagnostic coverage is incomplete, a crucial feature for commercial FPPs. Achieving this in real-time requires dedicated computational infrastructure, including high-performance CPUs, GPUs, or FPGA accelerators capable of running plasma models and AI inference pipelines with latency of just milliseconds.
Digital integration and real-time decision chain
Diagnostics only matter if their data can be integrated into real-time decisions. In an FPP, data from multiple diagnostics flows through two closely connected systems:
- Plasma control system (PCS): governs plasma shape, current, and density, executing control commands within milliseconds.
- Protection system: detects off-normal events and triggers rapid mitigation or shutdown to protect critical components.
A unified digital integration layer that combines diagnostics, UQ, DA, and model-based control will enable these systems to work together seamlessly. Emerging frameworks, such as the Integrated Modelling & Analysis Suite (IMAS) [5], can serve as the backbone for physics data. Meanwhile, industry standards such as Open Platform Communications Unified Architecture (OPC UA) can support machine-to-machine communication. The concept of AI-assisted interface contracts [16], proposed by our team, ensures that control actions remain verifiable and safe, even when autonomous algorithms are used.
Conclusions
In the transition from research tokamaks to commercial FPPs, diagnostics must evolve from instruments of discovery to enablers of reliable, long-term control. The extreme neutron and thermal environment limits the number and proximity of sensors, making full-state observation impossible.
To maintain stable and safe operation under these constraints, FPPs will rely on a new hierarchy of data-driven and model-based tools, including uncertainty quantification for confidence-aware decisions, machine learning for signal recovery and cross-diagnostic fusion, and synthetic diagnostics and data assimilation for consistent state estimation. Coupled with model-based predictive control and integrated within a unified digital architecture, these techniques will form the base for robust, autonomous plasma regulation.
The guiding principle is clear: in FPPs, we must measure the right things, quantify uncertainty, and control confidently despite imperfections.
Next Step Fusion is a supply chain company supporting tokamak developers in the design, simulation, optimization, control, and operation of their devices through integrated modeling and AI/ML-enabled solutions.
We invite you to be part of this groundbreaking journey!
At the moment, we’re very open to discussion and cooperation with specialists in fusion diagnostic systems!
Follow our blog on Medium, subscribe to our LinkedIn for regular updates, watch our videos on YouTube, or reach out to us directly to discuss potential collaborations.
References
[5] B. Peherstorfer et al., Survey of Multifidelity Methods in Uncertainty Quantification, Optimization, and Control. SIAM Rev. 60 (3) (2018).
[12] Lennholm M et al., Controlling a new plasma regime. Phil. Trans. R. Soc. A 382: 20230403, 2024.